

|
|

(울산=연합뉴스) 김근주 기자 = 울산과학기술원(UNIST)은 카메라 기반 자율주행차가 주변 환경을 더 정확하게 볼 수 있게 하는 인공지능(AI) 기술을 개발했다고 15일 밝혔다.
자율주행차와 로봇의 AI는 카메라나 라이다(LiDAR) 센서로 주변을 인식한다.
카메라는 라이다보다 저렴하고 가벼우며 색·형태 등 풍부한 정보를 제공하지만, 3차원 공간을 2차원 이미지로 표현하기 때문에 거리에 따른 크기 왜곡이 크다.
가까운 물체는 더 크게, 먼 물체는 더 작게 보이면서 멀리 있는 사물을 놓치거나 가까운 영역만 강조되는 오류가 생긴다.
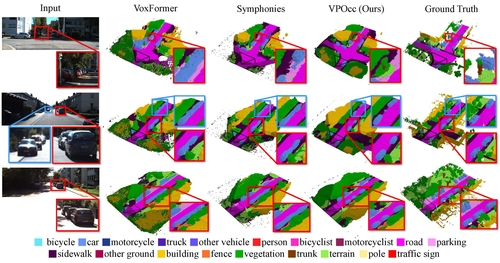
주 교수팀은 AI가 소실점을 기준으로 정보를 재구성하도록 설계해 이 문제를 해결했다.
소실점은 르네상스 시대 화가들이 정립해 내려온 원근감 부여 기법으로, 차선이나 철로 같이 실제로는 평행한 선들이 멀리서는 맞닿는 것처럼 보이는 지점을 말한다.
사람이 화폭 위의 소실점을 보고 평면에서 깊이감을 느끼는 것처럼, 개발된 AI 모델은 소실점을 기준으로 삼아 카메라 영상 속에서 깊이와 거리를 더 정확히 복원하게 된다.
주 교수팀은 "로봇, 자율주행 시스템뿐만 아니라 증강현실(AR) 지도 제작 등 다양한 분야로 응용될 수 있을 것"이라고 기대했다.
이번 연구 성과는 지능형 로봇 분야 권위 학회인 IROS(International Conference on Intelligent Robots and Systems)의 인정을 받았다.
canto@yna.co.kr
<연합뉴스>